CAPÍTULO 2
Principios de Reología
2.1. Introducción
La reología es una de las ramas de la ciencia que trata sobre la deformación en todos sus aspectos, desde la formación de fracturas (deformación no continua) hasta el flujo de materiales viscosos (deformación continua). La aplicación de esta disciplina en el campo de la geología es imprescindible para comprender la mayor parte de los procesos que regulan la deformación de la litósfera y que tienen relación con la tectónica y con la formación de las estructuras que se encuentran en la parte superior de la corteza. El emplazamiento de los cuerpos ígneos está estrechamente relacionado con el campo de esfuerzos regional y con las propiedades reológicas del magma y de la caja, siendo el contraste reológico entre ambos, una de las características que más influye en la forma y tamaño de los cuerpos ígneos.
El esfuerzo (stress) se define como la fuerza aplicada por unidad de área. Debemos recordar que la fuerza (F) es una acción que se ejerce sobre una masa (m) para cambiar su velocidad o imprimirle una aceleración (a). Su ecuación es F = ma y su unidad es el Newton (kg m s -2 ). La unidad del esfuerzo es el Pascal, que es igual a Newton m -2 . Con anterioridad a la vigencia del sistema internacional de medidas, el esfuerzo se expresaba en dinas cm -2 y la unidad se denominaba baria. La conversión de barias a Pascal es la siguiente: 1000 barias = 1 kb = 100 MPa. La distribución de los esfuerzos se puede representar en el espacio en un eje ortogonal de coordenadas y por convención se denomina s 1 al esfuerzo mayor, s 2 al intermedio y s 3 al menor. En un cuerpo en equilibrio, la suma de los esfuerzos es cero y se expresa con la siguiente relación s 1 -s 3 = 0. Cuando esta relación es distinta de cero (.... 1 -s 3 .0) el esfuerzo medio ( s m ) se define
![]()
El esfuerzo medio representa la presión confinante y es responsable de la compactación o dilatación de un cuerpo.
El esfuerzo desviatorio representa la magnitud del esfuerzo que se aparta del esfuerzo medio y se define como el esfuerzo normal menos el esfuerzo medio.
Cuando el esfuerzo diferencial es nulo el esfuerzo se denomina presión, como por ejemplo ocurre en los líquidos. Los esfuerzos pueden ser compresivos o extensivos comúnmente se denomina presión confinante, donde s 1 =s 2 =s 3 . En geología los esfuerzos compresivos tienen signo positivo y los extensivos negativos, contrariamente a la convención empleada en mecánica o ingeniería. La extensión se produce cuando el esfuerzo mínimo es menor que la presión litostática. En geología, y en escalas de orden regional, se dice que hay compresión cuando el esfuerzo máximo es horizontal y es superior al esfuerzo vertical, que es el mínimo, que corresponde al peso de la columna de rocas. El resultado es el acortamiento lateral, y, como se aplica la ley de preservación de la masa, se produce un aumento en el sentido vertical. En este mismo esquema, los esfuerzos son extensionales cuando el esfuerzo horizontal es menor que el peso de la columna de rocas que está por encima. Se produce una extensión lateral y una disminución en el espesor vertical.
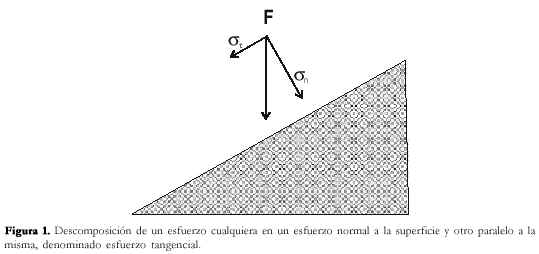
Cuando una fuerza actúa sobre un cuerpo se puede descomponer en un esfuerzo (= fuerza/ área) perpendicular a un plano cualquiera y otro paralelo al mismo (Fig. 1). El primero se denomina esfuerzo normal s n y el segundo esfuerzo tangencial (.... t ).
La deformación consiste en 1) traslación y 2) cambio de forma. No se considera como una deformación al cambio de volumen causado por la presión litostática, que se caracteriza porque la suma de los esfuerzos tangenciales es cero (.... t = 0). El cambio de volumen se conoce como dilatación, la cual si tiene una componente positiva se denomina compactación y si esa componente es negativa, se denomina expansión. Los esfuerzos normales solamente producen dilatación, y la magnitud del cambio de volumen depende de la porosidad y del coeficiente de compresibili-dad, o de dilatación, del material. La deformación, se expresa en forma porcentual, tomándose como parámetro de referencia un objeto en el cual pueda identificarse su forma original. La deformación puede ser homogénea o heterogénea. En el primer caso las relaciones entre los distintos elementos del cuerpo que se deforma se mantienen sin variar las relaciones angulares entre ellos. Es heterogénea, cuando al final de la deformación estos elementos no guardan ninguna relación entre si (Fig. 2). Asimismo, si durante la deformación progresiva los ejes del elipsoide de deformación permanecen paralelos a las direcciones de los esfuerzos principales la deformación es coaxial. Comúnmente se produce por cizalla pura (Fig.3a). Si durante la deformación los ejes del elipsoide de deformación rotan y no guardan el paralelismo con los esfuerzos principales se dice que la deformación es no coaxial. Con frecuencia se produce por los efectos de una cizalla simple (Fig.3b), que actúa como una cupla o par de esfuerzos.
El cambio de forma se puede lograr de maneras diferentes, dependiendo de las propiedades mecánicas del material y de la intensidad y duración del esfuerzo. La ruptura y el flujo pueden considerarse como los extremos del amplio espectro que abarcan los diferentes modos de deformación. La ruptura es un mecanismo por el cual comúnmente se deforman los materiales frágiles e implica una deformación no continua. El flujo, en cambio, es característico de los materia dúctiles y representa una deformación continua. Ejemplos de deformaciones intermedias entre estos extremos es el flujo cataclástico, que implica ruptura a niveles casi microscópicos y permiten el flujo del material.
2.1.1. Deformación no continua
El proceso de deformación no continua conduce al desarrollo de fracturas. Las mismas se dividen en dos grupos principales: 1) fracturas de extensión y 2) fracturas de cizalla. Las fracturas de extensión se caracterizan porque las paredes que la limitan no se desplazan una respecto a la otra en el sentido de la fractura. Son paralelas al esfuerzo máximo y perpendiculares al esfuerzo mínimo. Los diques ígneos, por ejemplo, se alojan en fracturas de extensión. En las fracturas de cizalla las paredes se desplazan en forma paralela a la fractura. Las fallas geológicas
Figura 3. Deformación de un cubo y relación entre los ejes del elipsoide de deformación (el eje intermedio es perpendicular al papel) y la dirección de los esfuerzos principales. a. Deformación coaxial. Los ejes del elipsoide no rotan respecto a la dirección de los esfuerzos principales. En líneas cortadas se muestran las trazas de los planos que no han variado. Cizalla pura. b. Deformación no coaxial. Los ejes del elipsoide rotan y se apartan de las direcciones de los esfuerzos principales. Las flechas en la cara superior e inferior del cubo indican la posición de los esfuerzos tangenciales máximos. La deformación es por cizalla simple.
son ejemplos de fracturas de cizalla. Se forman en dos planos conjugados, que forman entre si un ángulo diedro cuya bisectriz es el máximo esfuerzo. En estos planos es donde el esfuerzo tangencial alcanza su máximo valor (Fig.4a). La cohesión se mide por el ángulo de fricción interna (),que es la relación entre el esfuerzo normal (.... n ) y el de cizalla (.... t ) y se expresa de la siguiente manera (Fig. 4):
![]()
siendo el coeficiente de fricción.
Los mecanismos por los cuales se desarrollan las fracturas de cizalla han sido discutidos intensamente y los modelos más aceptados en la actualidad son dos: el de Navier - Coulomb y el de Griffith. Ambos emplean los diagramas ideados por Mohr para graficar las ecuaciones que gobiernan la fracturación. El esfuerzo diferencial (.... 1 -s 3 )constituyeel diámetrodelcírculo,con
frecuencia sólo se representa el semicírculo porque el otro semicírculo corresponde a la imagen especular.
Los diagramas de Mohr relacionan los esfuerzos de cizalla con los esfuerzos normales (Fig. 5) y permiten definir la posición de los planos en los cuales el esfuerzo de cizalla es máximo, el ángulo diedro que forman entre ellos y los correspondientes esfuerzos normales para esta situación. También permiten determinar gráficamente el ángulo de fricción interna Las ecuaciones son las siguientes:
En la ecuación (3) se relaciona el esfuerzo de cizalla máximo con el esfuerzo normal y el ángulo diedro formado por los planos conjugados de máxima cizalla. El valor de s 1 +s 3 /2 representa el esfuerzo medio, que es equivalente a la presión confinante. En la ecuación (4) se relaciona el esfuerzo normal con la diferencia entre el máximo y el mínimo esfuerzo y el ángulo diedro 2 . El valor del ángulo diedro depende del ángulo de fricción interna, de acuerdo con la siguiente relación: 2 = 90° - f . En los materiales dúctiles, cuyo ángulo de fricción interna es bajo el ángulo diedro tiende al valor teórico de 90°.
El criterio de ruptura de Navier - Coulomb se fundamenta en la ley de deslizamiento friccional, que presupone que el material tiene imperfecciones que sirven para concentrar los esfuerzos de cizalla. El criterio de ruptura está dado por las siguientes relaciones:
s t = S 0 + s n tan . = S 0 + s 0 µ (5)
donde s t = esfuerzo tangencial, S 0 = coeficiente de cohesividad (= cohesive shear strength) o coeficiente de fricción interna; s n = esfuerzo normal, . = ángulo de fricción interna y µes el coeficiente de fricción, (ecuación 1). La cohesión de una roca o de un material cualquiera es la fuerza que mantiene unidos sus componentes. El coeficiente es prácticamente una constante para la mayoríadelasrocas, yengeneralno dependedeltipode roca,conexcepciónde aquellasquesonricas en montmorillonita, vermiculita e illita, donde . tiene valores más bajos. En las rocas previamente fracturadas el coeficiente de fricción interna es de 0,6, mientras que en las rocas con montmorillonita y vermiculita es de 0,18.
La graficación en el diagrama de Mohr de la ecuación (5) da una recta que se denomina línea envolvente o línea de ruptura. De acuerdo con el criterio de ruptura de Navier - Coulomb el mate-rial se fracturará cuando el círculo de Mohr sea tangente a la curva envolvente (Fig.6). En ningún caso el círculo formado por la diferencia entre s 1 y s 3 podrá exceder la línea envolvente. En los casos en que el círculo de Mohr no alcance la línea envolvente no se producirán fracturas. Los valores de los esfuerzos normales a la izquierda del centro de coordenadas son negativos y representan tensión. De la observación de la Fig. 6 resulta obvio que la resistencia del material en tensión es marcadamente menor que en compresión. Los círculos que se encuentran a la izquierda del centro de coordenadas corresponden al campo de tensión pura. De acuerdo con el criterio de Navier - Coulomb el ángulo de fricción interna no varía con el aumento del esfuerzo normal.
En forma empírica se puede establecer que en los niveles más superficiales de la corteza, donde
s n es < 200 MPa, la ecuación (4) puede escribirse como
s t = 0,85 s n (6)
En los niveles más profundos de la corteza, donde s n está comprendida entre 200 y 2000 MPa, la ecuación (6) se transforma en:
s t = 50MPa + 0,6 s n (7)
Las ecuaciones (6) y (7) se conocen como ley de Byerlee, la cual expresa la magnitud del esfuerzo tangencial necesario para producir un deslizamiento a lo largo de una fractura. Entre 200 y 2000 MPa es necesario vencer un umbral de 50 MPa para lograr la ruptura.
El criterio de ruptura de Griffith se basa en las fuerzas interatómicas del material y presupone imperfecciones constituidas por grietas microscópicas que concentran en sus puntas el esfuerzo. Progresivamente estas grietas rotan para colocarse en los planos de máximo esfuerzo de cizalla, conduciendo a la ruptura. Las curva envolvente está dada por la ecuación:
s 2
t - 4T.... n - 4T 2 = 0 (8)
donde T es la resistencia en tensión (Fig. 7a). El ángulo de fricción interna es muy elevado en la zona del gráfico correspondiente a tensión pura y las rocas se fracturan por tensión. Con la disminución del esfuerzo tensional, y en transición hacia el campo compresional (.... n pasa de negativo a positivo) el ángulo de fricción interna disminuye aceleradamente, tendiendo a cero a medida que aumenta la presión normal, por lo cual el ángulo diedro se acerca al valor teórico.
De acuerdo con los resultados experimentales, el criterio de Griffith responde mejor para la ruptura en tensión. En cambio, el criterio de Mohr - Coulomb es aplicable para los esfuerzos en compresión. Por esta razón ambos criterios se han combinado en uno solo ( Fig. 7b) que se denomina criterio de ruptura combinado Navier - Coulomb - Griffith. El punto de unión de ambas ecuaciones se indica con la letra X y es el lugar donde las curvas tienen la misma pendiente (Fig.7b). Del diagrama de Mohr resulta obvio que la resistencia en tensión es significativamente menor que en compresión. La resistencia en tensión es la mitad a la resistencia cuando s n = 0.
El esfuerzo normal es nulo en la superficie de la Tierra pero también puede ser nulo en el interior de la misma cuando la presión del fluido que contiene la roca en sus poros iguala a la presión confinante. De acuerdo con Secor (1965) el esfuerzo efectivo (.... ef = s - p f ,) de una roca porosa está dado por la relación: s ef = s - p f , donde p f es la presión del fluido. La presión de fluido disminuye la resistencia de la roca, por lo cual en el diagrama de Mohr el círculo se desplaza hacia la izquierda (Fig. 7e). Los procesos de fracturación favorecidos por la presión de poros se denominan fracturación hidráulica y tienen una gran importancia en la apertura de fracturas en rocas en contacto con el magma o en los sistemas hidrotermales (Phillips, 1972).
Las condiciones para fractura están dadas por la relación
p f =s 3 + T (9)
donde T es la resistencia en tensión (Fig.7a). El magma actúa como un fluido a los efectos de la fracturación hidráulica, por lo cual su presencia facilita los procesos de fracturación. Por esta razón los magmas con más de 65 % de cristales se fracturan bajo la presencia de pequeños esfuerzos diferenciales. En medio secos las condiciones para la fracturación se logran solamente por el incremento del esfuerzo diferencial (Fig. 7d).
2.1.2. Deformación continua
El flujo es la deformación de un material sin pérdida de cohesividad, y está gobernado por diversas ecuaciones que dependen de los diferentes mecanismos microfísicos que regulan el flujo. La ecuación más general se denomina ley de flujo exponencial (power-law creep) o también de reptación (= creep) y está dada por:
![]()
donde e = tasa de deformación; C 0 = constante (GPa -n s -1 ), denominada constante de reptación y cuyos valores se dan en la tabla 1 del Propiedades Físicas del Magma; s n = esfuerzo elevado a un
.
potencia que normalmente se encuentra comprendida entre 1 y 5; Q = energía de activación, que es la energía necesaria para activar las modificaciones de la red cristalina de cada mineral; R = constante universal de los gases (R = 8,3145 J mol -1 °C -1 ) y T = temperatura absoluta. Los valores de Q para el cuarzo, el feldespato y la olivina se encuentran comprendidos entre 120 y 550 kJ mol -1 , siendo el más bajo el del cuarzo y el más alto el de la olivina (véase la Tabla 1 del Capítulo Propiedades Físicas del Magma). La ecuación (10) también se conoce como ecuación de Dorn y refleja una deformación que se incrementa en forma constante ante un esfuerzo constante.
2.1.3. Aspectos físicos de la deformación
El comportamiento reológico de los materiales se estudia a partir de dos escalas de observación, las cuales tienen una estrecha relación con los mecanismos de la deformación. Las escalas de observación son: 1) el análisis de las texturas y de las estructuras de las rocas, o arreglos de la fábrica y 2) el análisis de las perturbaciones y modificaciones que ocurren en el interior de la red cristalina de cada mineral o en el contacto de las redes cristalinas. El primer acercamiento se basa en la mecánica del continuum, que consiste en el tratamiento de los materiales como si estuvieran conformados como un conjunto de volúmenes discretos repetitivos en el espacio.
Por ejemplo una roca, o un conjunto de rocas, cuya composición y arreglos texturales se repiten en el espacio con similares características. También pueden ser conjuntos de rocas cuyos atributos y relaciones mutuas se repiten en el espacio. Las propiedades de cada una de las parcelas de volumen pueden ser representadas en el espacio por un sistema de coordenadas ortogonales y para su análisis se requiere del cálculo tensorial. Están incluidas dentro de la física del continuum la rotación y granulación de cristales, siendo ambos procesos los que generan las texturas de las rocas deformadas. En una escala mayor se encuentra la formación de la estructuras meso- a megascópicas, como por ejemplo las fallas, pliegues, brechas, etc.
El segundo tipo de aproximación para el análisis de la deformación se basa en el análisis de lo que sucede a nivel de la red cristalina y es la parte de la reología que trata los aspectos microfísicos de los materiales. Las deformaciones plásticas de los minerales se explican por las deformaciones de las redes cristalinas. En la deformación plástica no hay cambio de volumen, por lo cual no dependen de la presión. El aumento de la temperatura favorece la deformación plástica y cada mineral tiene un umbral característico a partir del cual comienza a fluir. La deformación plástica ocurre porque las celdas cristalinas son imperfectas, ya que contienen numerosos lugares vacantes que no están ocupados por los átomos correspondientes. La migración de los lugares vacantes es uno de los procesos por el cual se produce la deformación plástica.
Otros procesos son: formación de maclas, migración de átomos a lo largo del contacto de dos granos, disolución y cristalización, pequeñas variaciones en el ángulo de los ejes de la celda, etc.
Estos procesos no serán tratados en este manual, pero los lectores pueden recurrir a varios textos especializados que los tratan en detalle (Nicolas y Poirier, 1976; Poirier, 1985; Nicolas, 1987; Ranalli, 1987; Paschier y Trow, 1996).
Desde un punto de vista reológico los materiales se pueden dividir en dos grandes grupos: sólidos y fluidos. En reología se considera que un material se comporta como un sólido cuando al estar sometido a un esfuerzo diferencial no cede, a menos que ese esfuerzo alcance un umbral, que corresponde al límite de la resistencia. Un material se considera como fluido cuando cede fácilmente y exhibe un flujo constante ante pequeños esfuerzos constantes, sin importar cuan pequeños sean. Dentro de esta categoría pueden incluirse a los líquidos verdaderos y también a los agregados policristalinos, que bajo ciertas circunstancias especiales, como ser elevadas temperaturas y/o bajas velocidades de deformación, pueden fluir. El vidrio, que desde el punto de vista termodinámico es un líquido sobreenfriado y por lo tanto metaestable, puede comportarse como un sólido a temperatura ambiente y a altas velocidades de deformación. Pero a bajas velocidades de deformación se comporta como un fluido, fluyendo ante un esfuerzo constante. El incremento de la temperatura en los vidrios favorece el comportamiento fluido, existiendo una temperatura de transición, por encima del la cual el vidrio fluye constantemente. Las coladas de obsidiana son líquidos cuyas temperaturas se encuentran cerca del solidus y son lo suficientemente altas como para que la viscosidad no sea tan elevada y puedan fluir.
Cuando la suma de los esfuerzos tangenciales de un cuerpo que se encuentra en el interior de la Tierra es cero, se considera que está sometido a una presión confinante o litostática, términos comparables con el de la presión hidrostática. La presión litostática difícilmente se logra en los niveles superiores de la corteza debido a numerosos factores, encontrándose entre los más importantes: 1) la rigidez de las rocas de esta parte de la corteza, que permite almacenar y transmitir los esfuerzos; 2) el relieve irregular de la superficie, que se aparta de la superficie del geoide; 3) las diferentes composiciones de las rocas, que se corresponden con diferentes propiedades mecánicas; y 4) las estructuras previas de las rocas, como ser fracturas, pliegues, superficies de discordancia, etc. No obstante, como una aproximación se puede considerar que en la parte superior de la corteza se puede lograr una presión litostática cuando el esfuerzo diferencial es menor que la resistencia a la fracturación. La presión litostática está más generalizada en los niveles profundos de la corteza, donde los materiales tienen bajas resistencias y se comportan como fluidos, cediendo con facilidad ante pequeños esfuerzos. La duración de los esfuerzos, que se mide en escalas de tiempo acordes con los procesos geológicos, normalmente es mayor que 10 5 años.
La magnitud de la deformación y los diferentes tipos de procesos que intervienen dependen de numerosas variables, pero las más importantes son la presión, la temperatura y el tiempo.
También influyen la composición, y en forma muy destacable la presencia de fluidos intersticiales que interactúan con los minerales, favoreciendo la recristalización o los cambios mineralógicos.
No podemos dejar de mencionar aquí la importancia que tiene en el modo de deformación, el tiempo de aplicación de un esfuerzo y la velocidad con que se deforma el material. Según sea la magnitud de estas dos variables, un mismo material puede comportarse como un sólido o como un fluido y, por lo tanto, puede exhibir distintas capacidades para la transmisión los esfuerzos.
En la tabla 1 se presenta una síntesis de los principales tipos de deformación y las variables más importantes que los regulan. En la Fig. 8 se han representado distintos modos de deformación, principalmente elástica, frágil, y dúctil.
El flujo de un material puede ser plástico o cataclástico. El flujo plástico se distingue del cataclástico porque la deformación del material se produce por la deformación de las celdas cristalinas, sin producirse rupturas. En el flujo cataclástico, en cambio, la deformación se produce por la microfracturación de los cristales. En las rocas, que son agregados de minerales con diferentes propiedades reológicas, algunos de los mismos pueden deformarse plásticamente mientras que otros lo hacen por granulación. Un ejemplo de esto son los granitoides que se deforman a temperaturas entre 300 y 550°C, donde es frecuente que el cuarzo se deforma plásticamente y los feldespatos se granulan.
2.2. Elasticidad
Algunos materiales se deforman ante esfuerzos diferenciales de acuerdo con la siguiente ecuación, conocida como Ley de Hook:
s = E e (11)
donde s es el esfuerzo diferencial, e es la deformación y E es un coeficiente de proporcionalidad, que es una constante para cada material y se denomina módulo de Young.
El módulo de Young representa la magnitud del esfuerzo necesaria para causar una deformación y por lo tanto tiene como unidad la misma que el esfuerzo.
Los materiales que responden a la ecuación mencionada se denominan materiales elásticos o materiales que siguen la ley de Hook. La característica principal es que la deformación es instantánea y se recupera totalmente. Comúnmente existe un umbral para el esfuerzo por encima del cual el material se fractura, el cual se denomina límite elástico o resistencia a la ruptura. Al superarse el límite elástico se produce en forma instantánea la pérdida de la cohesión del material y la deformación, a partir de este momento, se produce por deslizamiento friccional.
Debido a que la deformación elástica es recuperable, la misma se encuentra almacenada como una energía elástica dentro de la celda cristalina. Cuando se retira el esfuerzo es esta energía la que permite la recuperación de la deformación. Debido a esta propiedad, se dice que la deformación de un material elástico es de tipo conservativa y, cabe destacar aquí, que se diferencia de la deformación de los materiales viscosos (véase más adelante) que es de tipo disipativa. La propiedad más destacable de los cuerpos elásticos con deformación conservativa, es la capacidad de almacenar los esfuerzos y, por lo tanto, de transmitirlos. La condición que tienen que cumplir es que dichos esfuerzos sean inferiores al límite de elasticidad. De esta manera, cuando se agrega un peso a un cuerpo elástico se produce en su interior una reorganización instantánea de los esfuerzos.
El módulo de Young de las rocas que componen la corteza y el manto es muy alto, del orden de 85-150 GPa. Debido a esta característica la magnitud de la deformación elástica en ellos es muy pequeña, y como el valor de E es mayor que el del límite de elasticidad se llega a la fracturación sin que la deformación elástica sea perceptible. No obstante, las rocas poseen los atributos característicos de la elasticidad, como p. ej. es la transmisión instantánea de los esfuerzos. Pero para que en este aspecto se pueda aplicar la teoría elástica las rocas no deben poseer fracturas previas, ni tampoco tener litologías con diferentes límites de elasticidad, como es común en las intercalaciones de areniscas y pelitas de las secuencias sedimentarias o en los complejos metamórficos. En general, la deformación se concentra en las rocas más débiles (= menos com-petentes), como p. ej. las pelitas, que absorben los esfuerzos, mientras que las más competentes (areniscas y cuarcitas), los refractan o alcanzan rápidamente la ruptura. En estos casos la transmisión efectiva de los esfuerzos es menor que en la teoría elástica porque se disipan, ya sea a través de deslizamiento friccional a lo largo de esas fracturas, y/o por consumirse en deformaciones dúctiles no recuperables.
Los otros coeficientes más importantes, además del módulo de Young, son el módulo de cizalla, el coeficiente de Poisson y el módulo de compresibilidad.
El módulo de cizalla o módulo elástico, que también se lo denomina módulo de rigidez (= shear modulus) (G) representa la rigidez de un cuerpo, es decir la resistencia a ser deformado, y expresa la relación entre el esfuerzo tangencial (.... t ) y la deformación ()
![]()
El módulo de rigidez o de cizalla expresa cuantitativamente la resistencia de un cuerpo ante un esfuerzo que tiende a deformarlo. Para iguales condiciones las rocas ricas en olivina tienen un módulo de rigidez más alto que para las rocas ricas en cuarzo y feldespato (Tabla 2).
La rigidez de las rocas disminuye con el aumento de la temperatura y con la disminución en la velocidad de deformación. En los fluidos newtonianos la rigidez es cero porque no ofrecen resistencia.
El coeficiente o relación de Poisson () expresa la relación entre la deformación perpendicular al eje del cuerpo, denominada deformación transversal y la paralela al eje del cuerpo, denominada deformación longitudinal:
![]()
donde e x , e y , e z representan la deformación según los ejes ortogonales del eje de coordenadas que representan a los vectores en el espacio.
El módulo de compresibilidad (ß) es la relación entre el esfuerzo normal (.... n ) y la contracción en el volumen:
El módulo de compresibilidad se relaciona con el coeficiente de Poisson y con el módulo de Young de la siguiente manera:
El módulo de cizalla se relaciona con el módulo de Young y con el coeficiente de Poisson de la siguiente manera:

donde G = módulo de cizalla, E = módulo de Young, . = coeficiente de Poisson.
El módulo de cizalla representa la resistencia de un sólido a ser cizallado y su magnitud es proporcional al módulo de Young e inversamente proporcional al coeficiente de Poisson. El módulo de cizalla tiene valores que oscilan entre 33 y 70 Gpa (330-700 kb), que al igual que el módulo de Young están muy por encima del límite elástico (Tabla 2).
El coeficiente de Poisson expresa la relación de la deformación lineal con respecto a la transversal. Cuando se estira una barra, de cualquier material, se cumple la ley de conservación de la masa. La vara al alargarse en el sentido longitudinal, tiene que angostarse en el sentido transversal, o viceversa, cuando la barra está sometida a compresión el espesor se incrementa.
El módulo de Young, en cambio, sólo considera la deformación lineal. El coeficiente de Poisson en los sólidos ideales es de 0,5, pero en las rocas es siempre mucho menor, de alrededor de 0,12 - 0,30. Las rocas máficas y las ultramáficas son las que poseen los valores más elevados.
El módulo de compresibilidad expresa la capacidad que tienen los materiales de dilatarse o contraerse por los efectos de la presión. Los valores más frecuentes en la rocas oscilan entre 0,8 x 10 -11 Pa -1 (0,8 x 10 -6 bar -1 ) y 2 x 10 -11 Pa -1 (2,0 x 10 -6 bar -1 ) para las dunitas y los granitos respectivamente.
Gran parte de la información geofísica del interior de la Tierra se obtiene a través de la velocidad de propagación de las ondas sísmicas compresionales (V P ) y las de cizalla (V S ), las cuales se denominan respectivamente ondas-P porque son las primeras en arribar por su mayor velocidad, y las de cizalla se denominan ondas-S, porque arriban en segundo lugar. Las ondas-P también se denominan longitudinales porque las partículas vibran en la dirección de la propagación de la onda. Las ondas-S también se denominan rotacionales, porque la vibración de las partículas se realiza en un plano normal a la dirección de propagación (Fig. 9).
Las ondas-S y las ondas-P requieren un medio elástico para su propagación y dependen de los módulos de rigidez (G) y de compresibilidad (ß) del medio y también de la densidad () del mismo, de acuerdo con las siguientes ecuaciones:
donde V P representa la velocidad con que propaga a través del medio la onda-P y V S la velocidad de la onda-S.
Anelasticidad: En algunos materiales no siempre se cumple la ley de Hook, porque no se comportan como cuerpos elásticos perfectos. Parte de la energía almacenada como deformación elástica no se recupera y es, entonces, disipada como calor. En estos casos no toda la deformación es conservativa, sino que una parte de ella, aunque sea mínima, es de tipo disipativa
y su recuperación parcial depende del tiempo. De acuerdo con estas características las ondas sísmicas, al no atravesar un medio puramente elástico, sufren una atenuación.
2.3. Viscosidad
La viscosidad es la resistencia que tienen los cuerpos fluidos para fluir y está gobernada por la siguiente ecuación:
s t = .e (18)
donde s t es el esfuerzo tangencial, e es la velocidad a la cual se deforma o fluye el material y . es el coeficiente de proporcionalidad, denominado viscosidad, y que es propio de cada material.
La viscosidad representa el esfuerzo necesario para producir una cantidad definida, en una unidad de tiempo, de deformación. Cuanto más viscoso es el material mayor será el esfuerzo necesario para producir una mayor cantidad de deformación en un mismo tiempo. En los cuerpos viscosos la deformación es de tipo disipativa y no se recupera. Por este motivo la disipación de los esfuerzos debe transformarse en alguna otra forma de energía, comúnmente en calor.
La propiedad más destacable de los fluidos es que la deformación es proporcional al tiempo. Cuanto más tiempo se encuentre un fluido sometido a un esfuerzo constante, mayor será su deformación. En los fundidos ígneos existe, en la realidad, un límite para el tiempo, que está dado por el descenso de la temperatura. El enfriamiento de los fundidos promueve la cristalización y un consecuente aumento progresivo de la viscosidad hasta llegar a constituir un cuerpo rígido.
La deformación, e , es un tensor que representa el gradiente de un desplazamiento. Si du es el diferencial de la elongación de una línea, hecho que implica un cierto desplazamiento a lo largo de esa línea, el gradiente del desplazamiento se expresa por la relación du/dx siendo dx el diferencial de la dimensión original. La relación du/dx indica el gradiente, que en este caso es en el sentido del eje x. El desplazamiento u de los puntos de un cuerpo no es constante. Esto implica una deformación interna del cuerpo puesto que el desplazamiento varía de un punto a otro. Si el desplazamiento de los puntos fuera constante se trataría de un cuerpo rígido y no habría deformación interna, sino fracturación y traslación, cualquiera sea la dimensión de la fracturación. La tasa de deformación, e , que también es un tensor, expresa la variación del gradiente del desplazamiento en el tiempo, y está dada por la ecuación:
La relación du/dt es la diferencia de la magnitud del desplazamiento de dos partículas contiguas.
Si A y B son las partículas se tiene:
![]()
siendo U B y U A los vectores del desplazamiento de las partículas A y B y du la diferencia de ambos.
La magnitud de las velocidades de A (V A ) y de B (V B ) está dada por
y la diferencia entre las velocidades de A y B está dada por:
Reemplazando du/dt de la ecuación (19) por dv de la ecuación (21) se tiene:
Se consideran tasas de deformación lentas las comprendidas entre 1 x 10 -12 s -1 y 1 x 10 -18 s -1 . Con estas condiciones los materiales ceden ante bajos esfuerzos y fluyen (creep) con facilidad.
Existe una aproximación entre la magnitud del esfuerzo y la tasa de deformación. Los diagramas experimentales de esfuerzo versus tasa de deformación en olivina (Ranalli, 1987, p. 290) muestran un incremento linear entre el esfuerzo y la tasa de deformación: para un esfuerzo de 100 MPa la tasa de deformación es de 1 x 10 -5 s -1 , mientras que para 10 MPa es de 1x10 -8 s -1 .
Esto significa que la tasa de deformación varía de cuerdo con la magnitud del esfuerzo aplicado.
2.4. Cuerpos con propiedades reológicas combinadas
En la naturaleza difícilmente se encuentran cuerpos que tienen un comportamiento elástico o viscoso puros. Gran parte de las grandes unidades rocosas se comportan con propiedades reológicas que resultan de la combinación de elementos elásticos con viscosos. En este sentido los cuerpos más importantes son los firmoviscosos (= cuerpos Kelvin), los viscoelásticos (= cuerpos Maxwell) y una combinación de estos dos que se denominan cuerpos Burgers. Para un análisis más detallado de estos temas se sugiere la lectura de Ranalli (1987, p. 84-87), de quien se ha condensado los párrafos que siguen a continuación.
2.4.1. Cuerpos firmoviscosos o Kelvin: El modelo reológico de estos cuerpos es el de un elemento elástico y un elemento viscoso dispuestos en paralelo (Fig. 10). Cuando un cuerpo de esta naturaleza es sometido a una carga el elemento viscoso retarda la deformación elástica. De no haber participado el elemento viscoso la deformación hubiera sido instantánea. Por este motivo la deformación de un cuerpo firmoviscoso es una función del tiempo y la recuperación de la deformación, que es una propiedad elástica, también es dependiente del tiempo.
La ecuación constitutiva es:
![]()
y la deformación está expresada por
donde G K es el módulo de cizalla o rigidez del elemento Kelvin del cuerpo y h K es la viscosidad Kelvin, s es el esfuerzo de carga, e es la deformación y e 0 es la deformación inicial instantánea.
De acuerdo con esta última ecuación la deformación disminuye exponencialmente hasta cero, recuperándose completamente (Fig.10).
La relación entre la viscosidad Kelvin y la rigidez Kelvin, . K /G K , expresa el tiempo que tarda en recuperarse la deformación. Por ejemplo, cuando G K = 0 el tiempo de relajación es infinito porque el elemento viscoso interviene en un 100% y la deformación no se recupera.
Cuando G K = 8ó . K = 0 el tiempo de relajación es cero porque el elemento elástico se encuentra recuperado en su totalidad. La relación . K /G K se llama tiempo de relajación Kelvin, t K, , y tiene la dimensión de tiempo.
2.4.2. Cuerpos viscoelásticos o Maxwell: Resulta de la combinación de un elemento elástico y de uno viscoso dispuestos en serie (Fig. 10). Al estar acoplados de esta manera el cuerpo
Figura 10. Modelos reológicos resultantes de la combinación de elementos viscosos y elásticos expresados en diagramas deformación-tiempo. Redibujado de Ranalli (1987, p. 84). Las relacioness s 0 /2G K , s 0 /2G M y s 0 /2G 2 representan la deformación elástica (cuya expresión general es: e = s 0 /2G) lograda por el esfuerzo inicial (.... 0 ). G es el módulo de cizalla o coeficiente de rigidez y los subíndices K y M indican que corresponden a los elementos Kelvin y Maxwell respectivamente. G 2 indica que corresponde al elemento Maxwell del cuerpo Burger. t 0 y t 1 indican la iniciación y liberación del esfuerzo a un tiempoinicialy finalrespectivamente.Enel cuerpoKelvinladeformación serecuperatotalmentepero enformaretardadapor el elemento viscoso. En el cuerpo Maxwell la deformación que se recupera es la elástica, mientras que en el cuerpo Burger se recuperan las dos deformaciones elásticas, una instantáneamente y la otra en forma retardada. Las diferencias entre estos tres tipos de cuerpos no son tan marcadas en la práctica y no resulta sencilla su identificación. Por esta razón, el término viscoelásticoesutilizadoen formagenéricayel modeloquemásse acercaaeles elcuerpoBurgerque tieneundesarrollosimilar al fenómeno de reptación (creep)
se deforma instantáneamente debido al elemento elástico y luego la deformación es proporcional al tiempo. La ecuación constitutiva es:
y la deformación total bajo un esfuerzo constante está expresada por:
donde s 0 es el esfuerzo inicial.
Cuando se retira el esfuerzo se recupera únicamente la deformación elástica .
Si la tasa de deformación se mantiene constante es e = 0 y la solución de la ecuación es:
donde s 0 es el esfuerzo inicial aplicado.
La relación entre la viscosidad Maxwell y el módulo de cizalla: . M /G M = t M se denomina tiempo de relajación Maxwell. Esto significa que cuando la tasa de deformación es constante, el esfuerzo diferencial tiende a cero al cabo de ese tiempo. En los cuerpos viscoelásticos el esfuerzo se disipa al ser consumido por la deformación. Esta es una diferencia importante con los cuerpos firmoviscosos, cuya constante de relajación expresa la recuperación de la deformación al extinguirse el esfuerzo.
Con respecto a la aplicación de alguno de estos modelos para estudiar el comportamiento del manto ante la deformación, hasta ahora solo se han esbozado aproximaciones preliminares debido a la complejidad de los procesos. Uno de estos procesos, que más ha sido tenido en cuenta para tratar de comprender el comportamiento reológico del manto, es el del rebote isostático de las masas continentales que sucedió cuando se retiraron los hielos de la última glaciación. El peso de la calota de hielo produjo un esfuerzo sobre la litósfera que la flexionó y, al mismo tiempo, deformó el manto. Se puede deducir que el manto se habría comportado como un fluido que tuvo una viscosidad linear (newtoniana). Este comportamiento es efectivo para deformaciones que duran más de 1000 años, mientras que muestra una respuesta elástica para lapsos más cortos. En este sentido el manto se acerca al comportamiento de un cuerpo viscoelástico en cuanto que comenzó con una deformación instantánea, y luego le siguió una deformación proporcional al tiempo. El retiro de los hielos liberó el esfuerzo sobre el continente, produciéndose su rebote isostático. El tiempo de recuperación de la deformación se ha podido determinar con exactitud midiendo la variación de las alturas en los niveles de las líneas de costa. Este tiempo de relajación es de aproximadamente 1 x 10 3 años, que se ajusta al tiempo de relajación Maxwell con una viscosidad del manto de 1 x 10 21 Pa s y G M = 1 x 10 11 Pa.
2.4.3. Cuerpos Burger: Estos cuerpos definidos por Ranalli (1987, p.87) resultan de la combinación en paralelo de los cuerpos Kelvin y Maxwell (Fig.10). Las ecuaciones constitutivas son complejas porque requieren de dos diferentes viscosidades y de dos coeficientes de rigidez, que corresponden a cada uno de los referidos cuerpos. No es el objeto de este manual profundizar sobre este tema, cuyo desarrollo se puede encontrar en el texto de Ranalli (1987).
En los materiales que se comportan como un cuerpo Burger, el esfuerzo tangencial produce tres tipos de deformación (Fig. 10). La primera de todas es una deformación elástica instantánea, que permite el almacenamiento de una cierta cantidad de energía, que vuelve al sistema una vez retirado el esfuerzo. El segundo tipo de deformación está constituido por una lenta deformación retardada, la que también es elástica y por lo tanto recuperable. La tercera y última manera de deformación es totalmente viscosa y, en consecuencia, es no recuperable. Esta última es la que ocupa el mayor volumen de la deformación y por lo tanto, la característica principal del material al deformarse es la fluxión. Esta manera de deformarse es comparable con la reptación (creep) de los sólidos.
El magma, descripto como un líquido Bingham, también puede ser considerado como un cuerpo viscoelástico, en el cual la porción de deformación viscosa es muy superior a las dos componentes elásticas. Sin embargo, cuando la viscosidad efectiva del magma es muy alta, debido a la gran proporción de partículas en suspensión (cristales), la energía que puede almacenar es superior a su resistencia, conduciendo a la formación de fracturas. En este caso disminuye en forma relativa el elemento viscoso.
Las diferencias entre estos los tres tipos de cuerpos descriptos no son tan marcadas en la práctica y su identificación no es sencilla. Por esta razón, el término viscoelástico es utilizado en forma genérica y con un sentido muy amplio y el modelo que más se acerca a la realidad y resume las características de los otros dos es el cuerpo Burger, cuyo desarrollo de la deformación es similar al proceso de reptación.
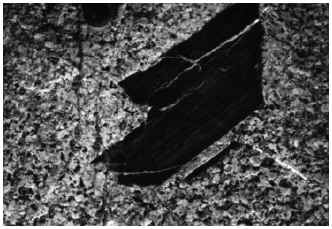
Lámina 1. Dos inclusiones en rocas graníticas con características reológicas y tiempos de residencia en el magma diferentes. Arriba, la inclusión es una filita inyectada, con bordes planos, y esquinas angulosas a astillosas, que indican fracturación frágil. No presenta alteración alguna, sugiriendo que el tiempo de residencia en el magma ha sido muy corto. Granodiorita Las Piedritas, batolito de Colangüil. Abajo, inclusión microgranular máfica con bordes suaves y curvilíneos que se adaptan armónicamente al flujo del magma. El tiempo de residencia ha sido largo ya que la inclusión muestra un progresivo reemplazo por parte de la roca hospedante. Este reemplazo se explica porque la presencia de la inclusión da lugar a un fuerte gradiente de composición. Debido a que las temperaturas magmáticas se mantienen por largo tiempo los procesos de difusión tienden a equilibrar la composición.